教程_ARAL环境搭建及基本使用
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2023/06/27 | V0.1 | 初始化文档 | 曾雨昊 |
本教程用于快速上手开发ARAL算法,并在仿真平台中控制虚拟或真实机械臂运动,进一步验证算法。
1.安装虚拟机环境
参考链接
2.配置Git, 克隆需要开发的仓库
1)打开终端,配置个人git信息:
git config --global user.name "zengyuhao"
git config --global user.email "zengyuhao@aubo-robotics.cn"
2)打开Gitlab,选择需要克隆的仓库(此处以ra_svsp为例)
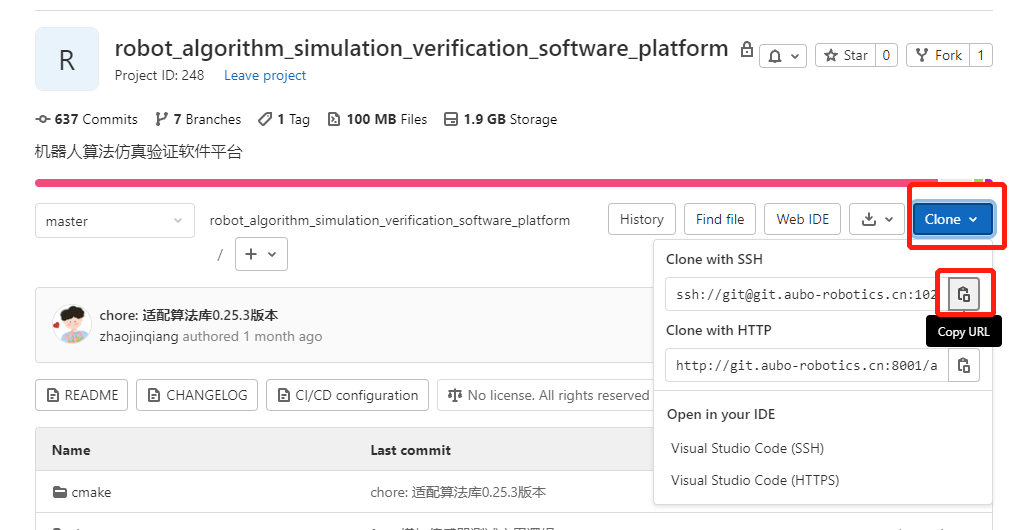
此处推荐用SSH方法clone,如未配置SSH,可以参考教程:Gitlab如何添加SSH Key
3)在本地进行克隆
在终端输入指令,克隆仓库:
git clone ssh://xxx.git
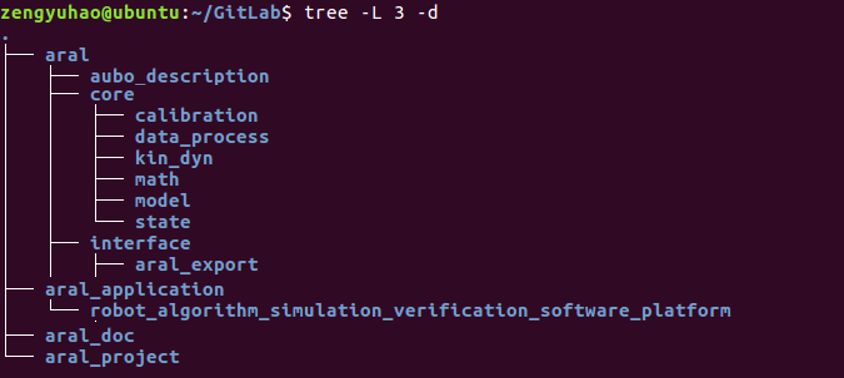
需要注意的是,部分模块在本地编译时可以选择依赖其他的本地模块,所以各模块的相对路径建议与下图保持一致,即:interface模块与core在同一目录,其余模块在core的子目录下。
常见问题:
解决方法:文档 - 3.http clone问题
3.配置Qt, 运行模块
此处以ra_svsp为例,在qt内配置工程
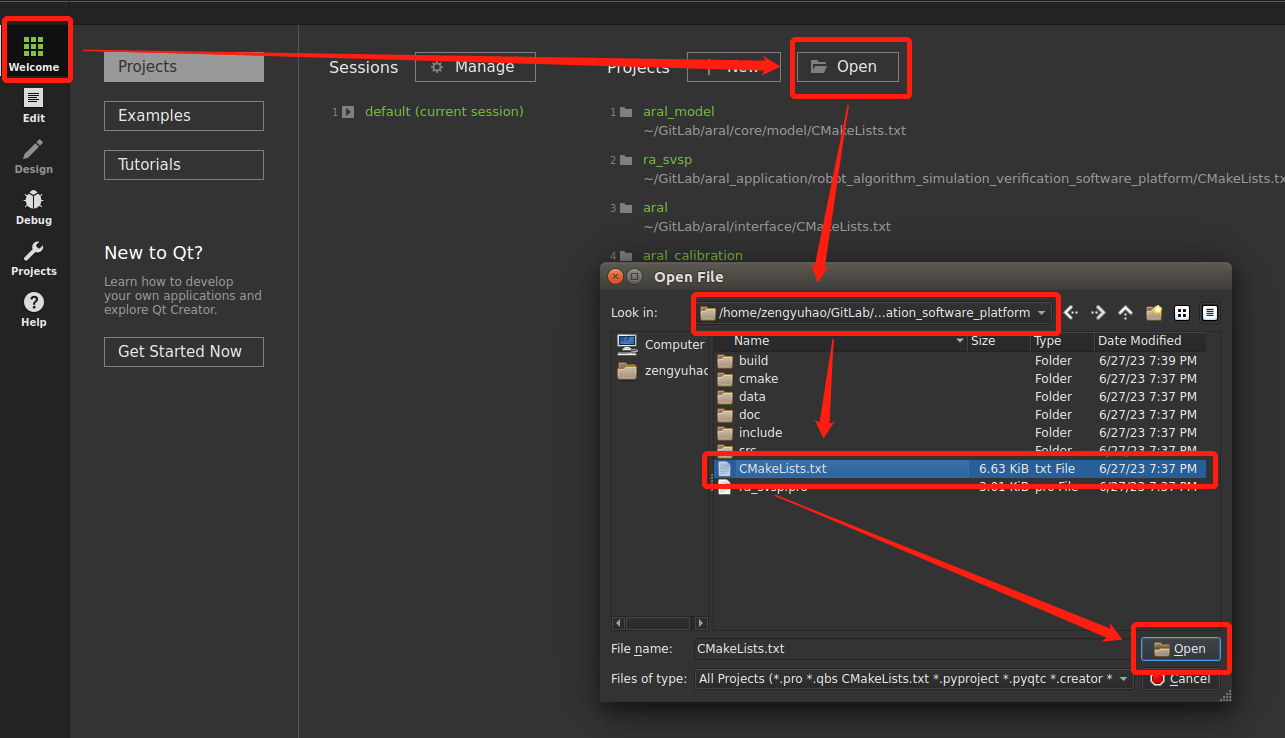
1)通过CMakeLists.txt打开工程
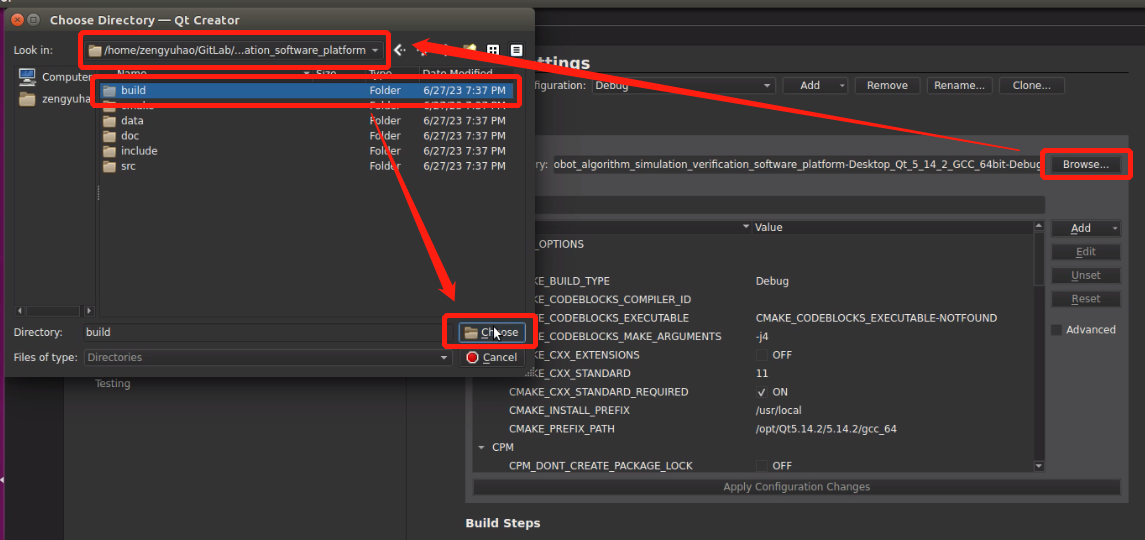
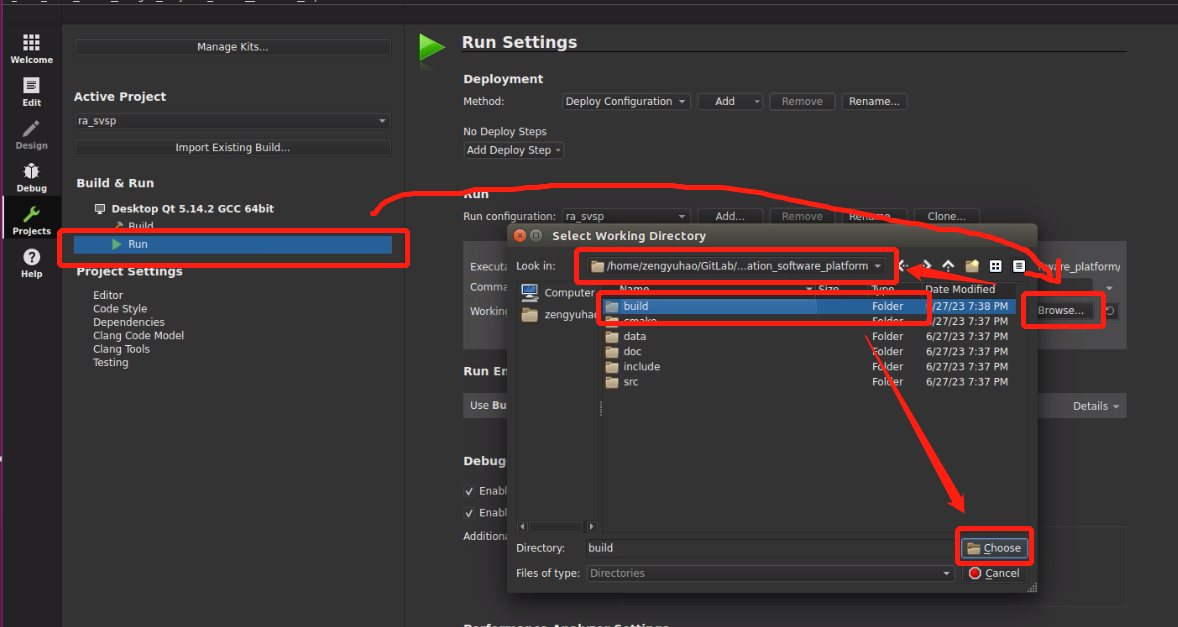
2)Projects配置Build和Working directory的路径
Build路径默认是和根目录平级的长字符串,应改为根目录下的build(如没有这个路径,则手动新建一个build文件夹):
<your directory>/robot_algorithm_simulation_verification_software_platform/build
Working directory路径默认是build/文件夹下的其他路径。对于ra_svsp,应改为:
<your directory>/robot_algorithm_simulation_verification_software_platform/build
若是core目录下的其他模块如model, kin_dyn等,则需要将运行目录改为仓库的根目录,如:
<your directory>/model
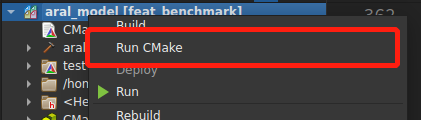
3)Run CMake
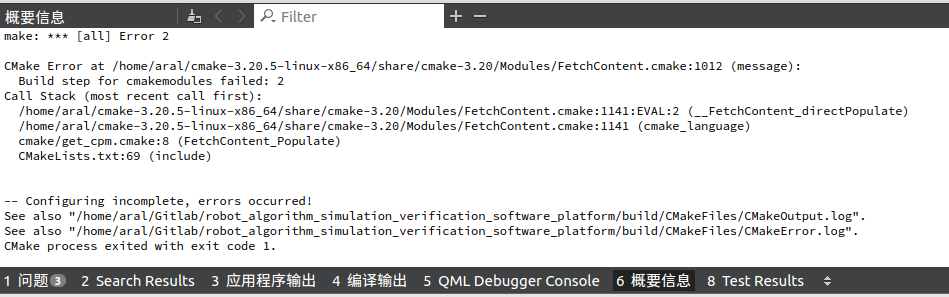
右击工程,Run CMake,会在build路径下载需要的依赖,如无报错则继续下一步。
4)Build&Debug
先点击左下角红框内的Build,编译工程。如无报错,则电机蓝框内的Debug。

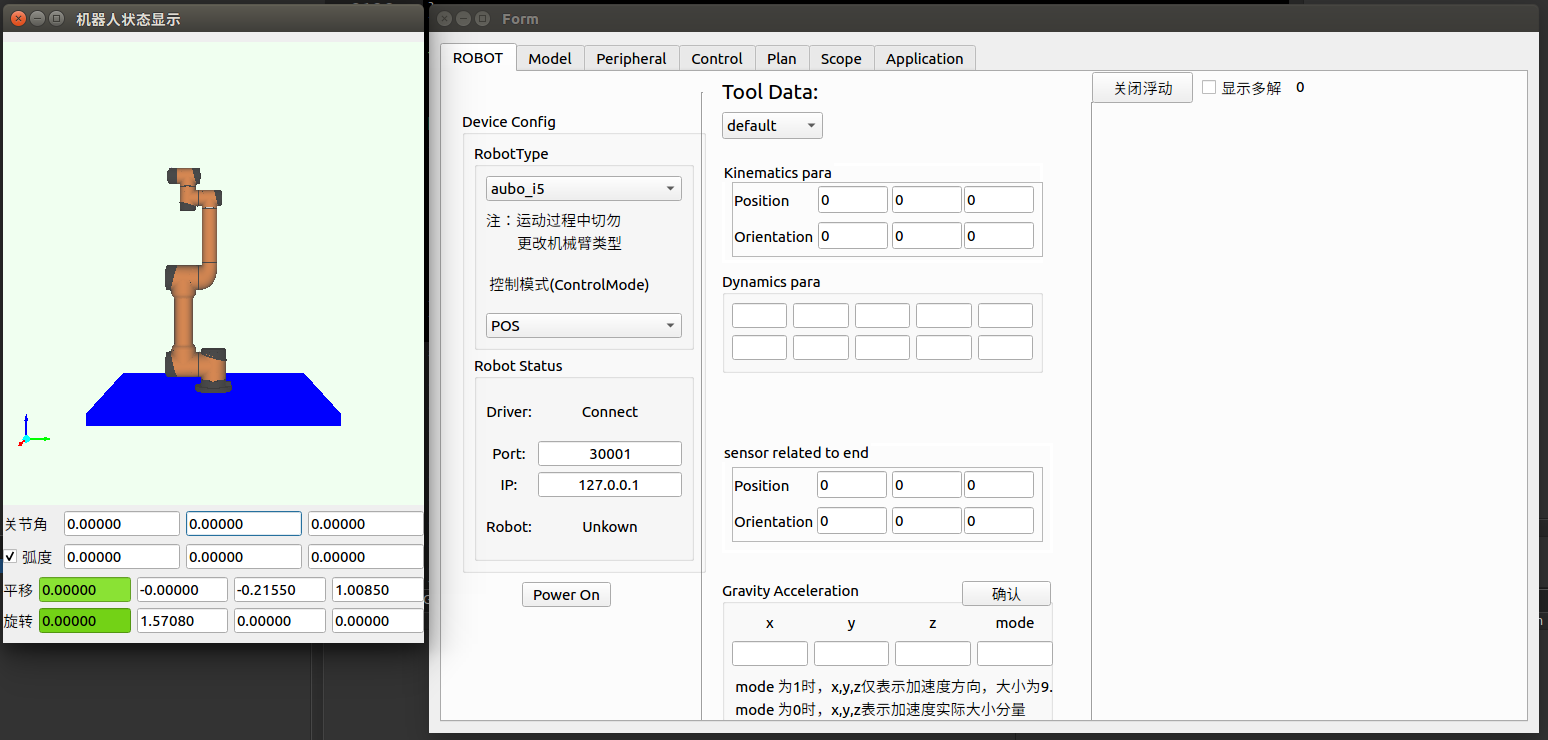
若均无报错,ra_svsp在debug结束后会弹出如下界面(如debug报错,直接跳到第4节):
其他模块如interface, model等在debug结束后会弹出如下界面:
至此,ARAL环境已配置完成。
4.仿真平台初探
此处给出一个仿真平台的仿真模式对虚拟机械臂进行控制的例子,以验证ARAL环境已经就绪。对于真实机械臂控制和仿真平台使用时遇到的问题,将来另整理文档。
按照3.节所述操作对ra_svsp进行编译和运行,很有可能会遇到如下问题:

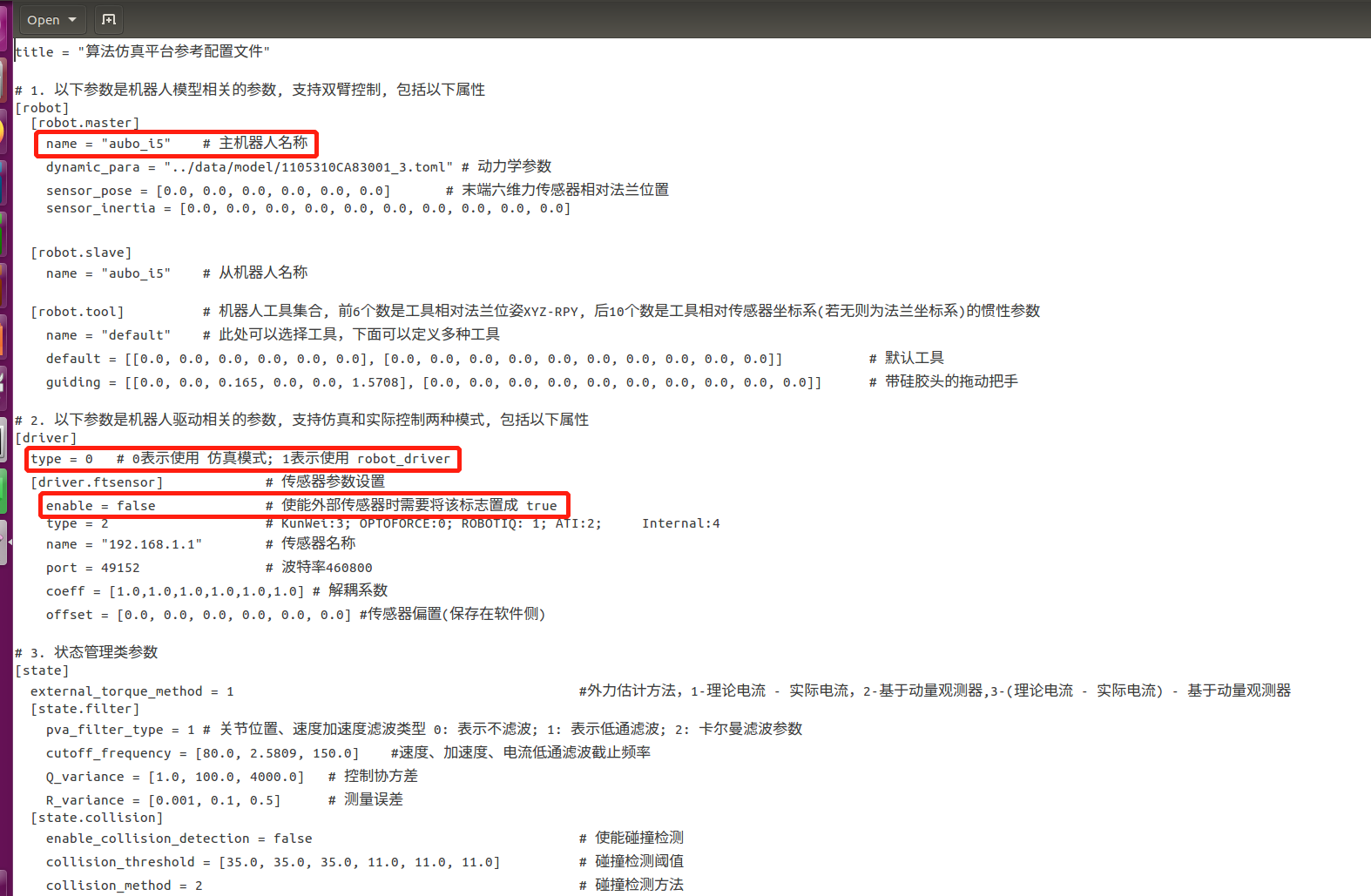
这是由于缺少config.toml配置文件导致的。应在./doc路径下找到这一文件,并复制到根目录下,重新运行即可,同时需要确认config.toml的几处信息:
[robot] -> [robot.master] -> name = "aubo_i5" # 确认master机器人名称制定正确
[driver] -> type = 0 # 仿真模式取0
[driver] -> [driver.ftsensor] -> enable = false # 仿真模式无传感器,置false
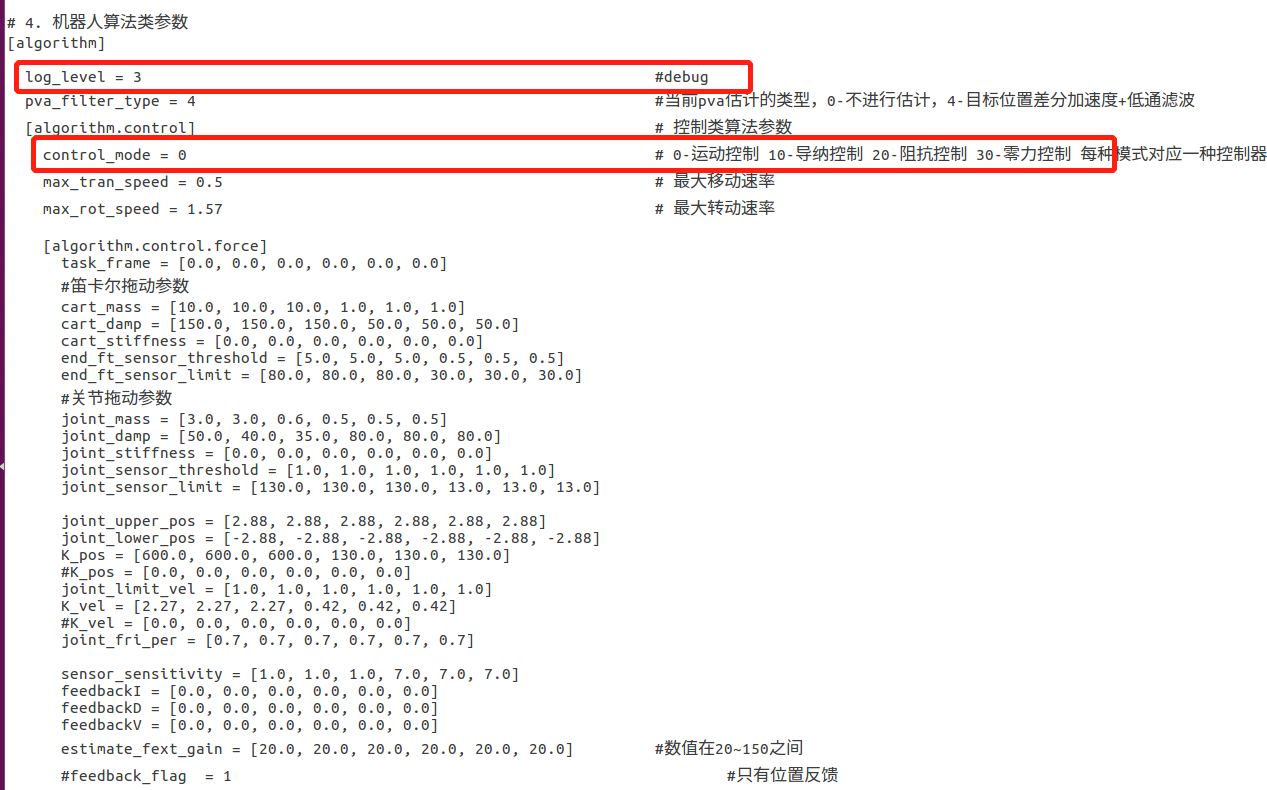
[algorithm] -> log_level = 3 # 设置合适的log_level,避免过多log影响性能
[algorithm] -> [algorithm.control] -> control_mode = 0 # 仿真模式下只用得到0-运动控制模式
确认上述信息无误后,可以再次运行ra_svsp。在此对plan界面做一个初步介绍:
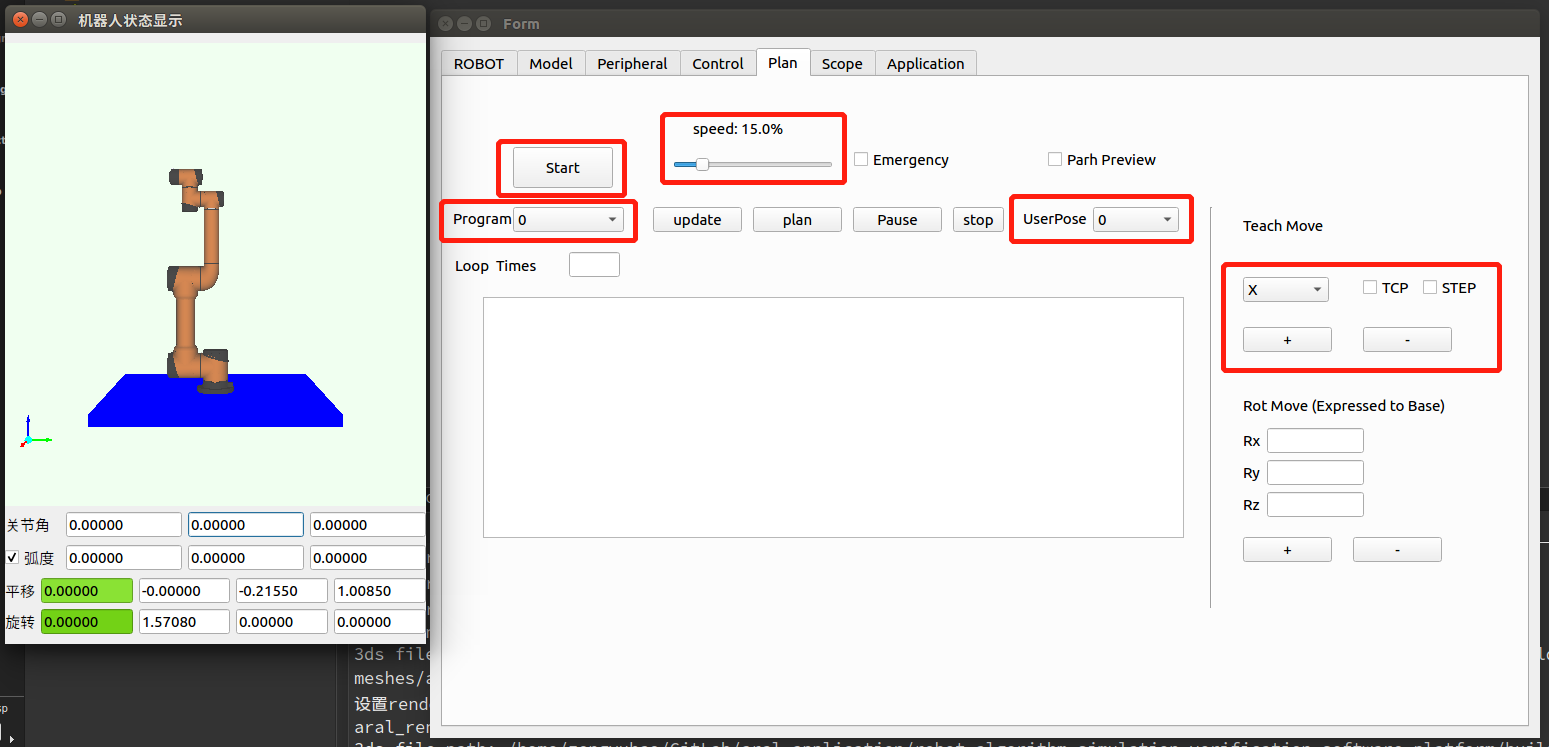
- Start:想要在仿真模式下控制机械臂运动,需要先点击Start,点击后此控件的标签会变为Stop
- Program:默认为0,通过下拉条选择已经规划好的一些程序,Start后可以看到机械臂按照这些程序运行
- Speed:默认为15%,速度系数,实机操作时不宜太大
- UserPose:默认为0,通过下拉条选择一些固定点或轨迹,Start后可以看到机械臂运动到指定位置
- Teach Move:通过下拉条选择末端在笛卡尔空间的X/Y/Z/RX/RY/RZ方向或关节空间joint1~6运动,点击+/-可以点动式控制机械臂运动
若上述功能可以正常驱动机械臂在仿真环境下运行,则环境搭建已成功。进一步地使用仿真平台的方法将来另整理文档。